projects
A curated collection of my work—from Research initiatives to course-based assignments. Click on any card for full details.
Research Projects
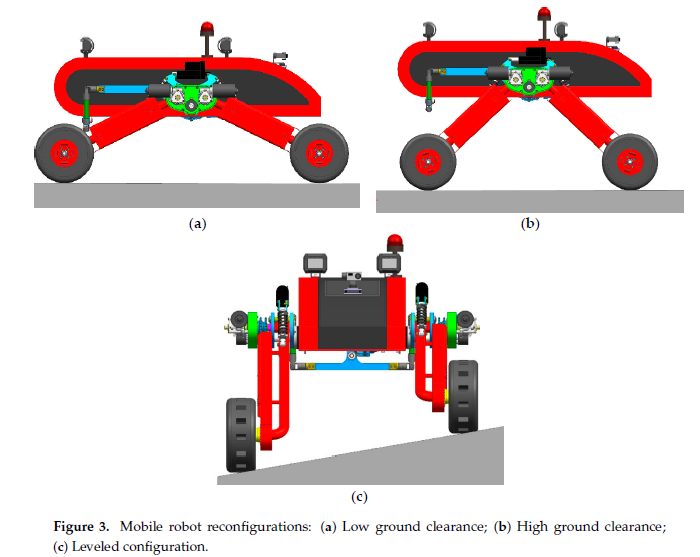
PRISMA Lab Internship — Posture-Capable Suspension Concept for a Lunar Micro-Rover
Summer 2025 research internship at PRISMA Lab (Univ. of Naples Federico II): I developed and justified a per-side actuated suspension concept for a compact lunar rover (heave + roll, passive pitch averaging) and delivered a simulation-first implementation roadmap (ROS 2 + Gazebo) for posture-aware autonomy.
robotics rovers suspension lunar ros2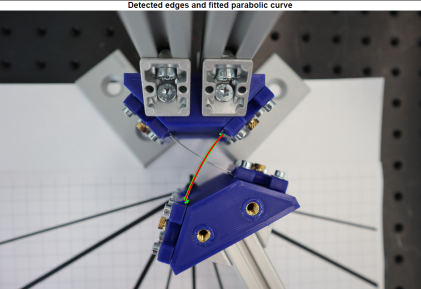
TUM MIRMI — Crossed-Flexure Pivot Study — Process-Driven Modeling & Prototyping
Process-focused study of crossed-flexure (cross-spring) pivots as compliant stages for force–torque sensing: literature grounding (parasitic center-shift, lateral loading), dimensionless modeling, Newton–Raphson MATLAB solver, CAD to prototype iterations, and vision-based deformation tracking. Conducted at TUM-MIRMI under Mehmet Can Yıldırım and Prof. Sami Haddadin.
robotics sensing force-torque flexures compliant-mechanisms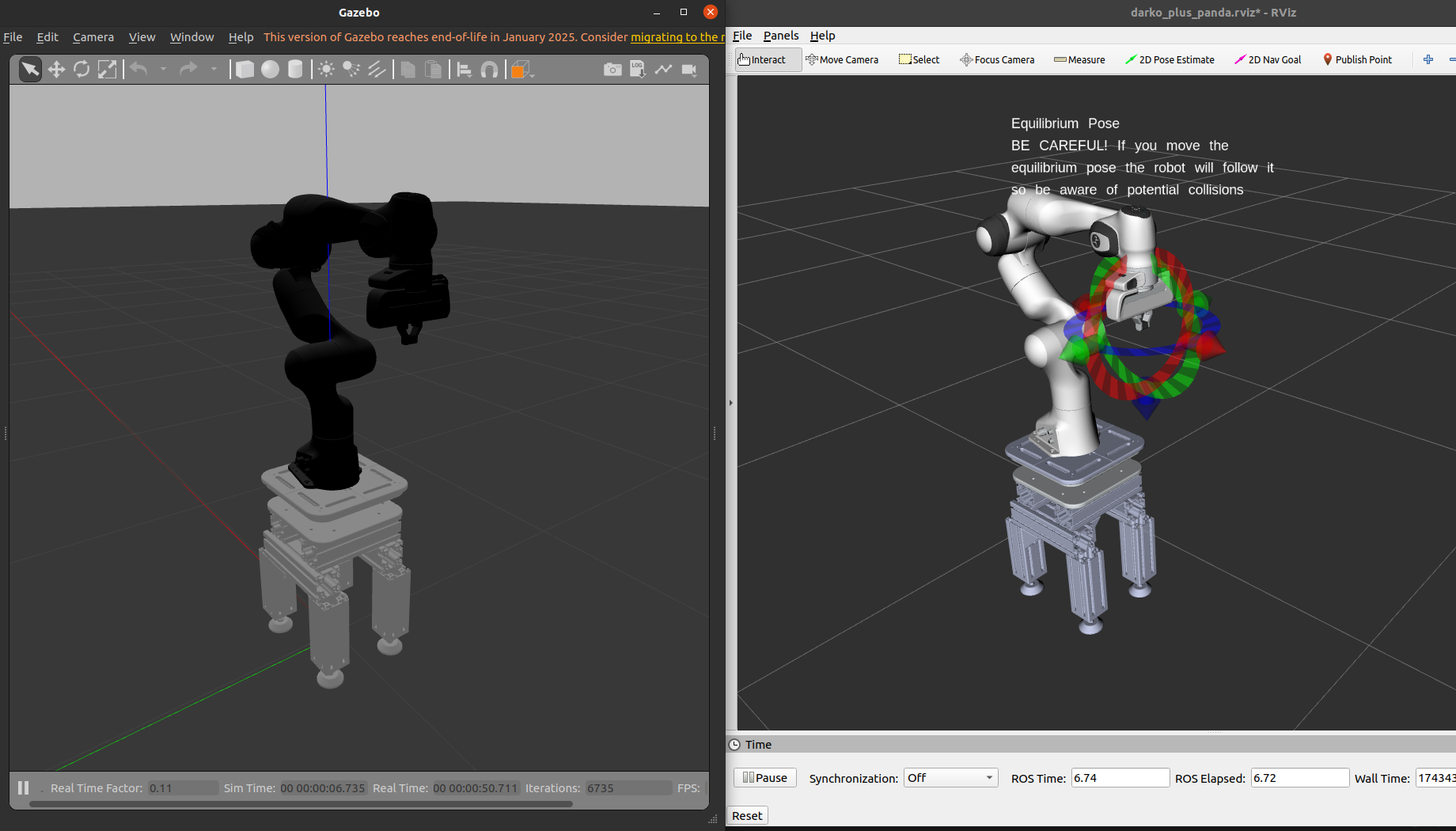
TUM MIRMI — Panda-Base Digital Twin — ROS Noetic / Gazebo Package
ROS Noetic package that provides a Gazebo 11 + RViz digital twin of a Franka Emika Panda mounted on a custom aluminium-profile base. Built as a reusable simulation workspace for URDF/Xacro iteration, controller bring-up, and safe pre-hardware validation. Developed at TUM MIRMI.
robotics ROS Gazebo RViz franka_ros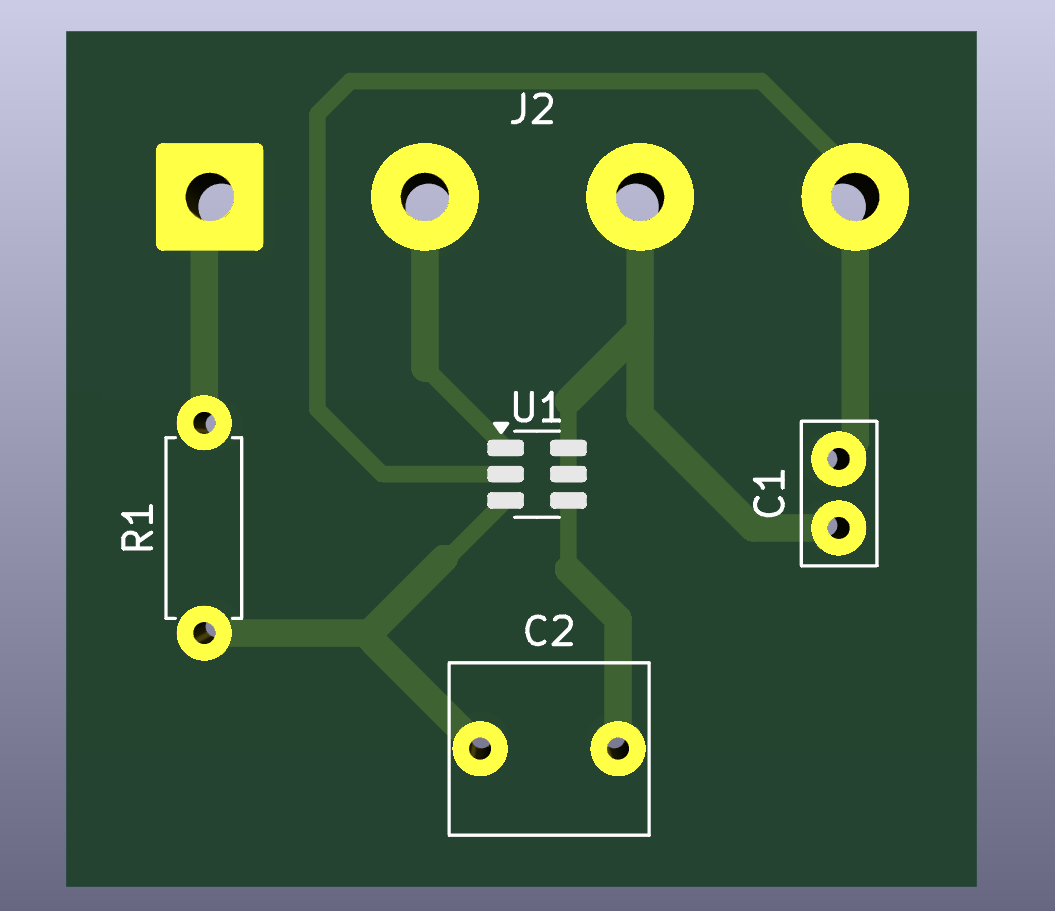
AT42QT1011 Touch Sensor PCB Prototype
A small AT42QT1011-based capacitive touch sensor PCB designed in KiCad and fabricated on an LPKF S63. A hands-on exercise in schematic capture, PCB layout, and in-house prototyping.
pcb electronics capacitive-sensing kicad lpkf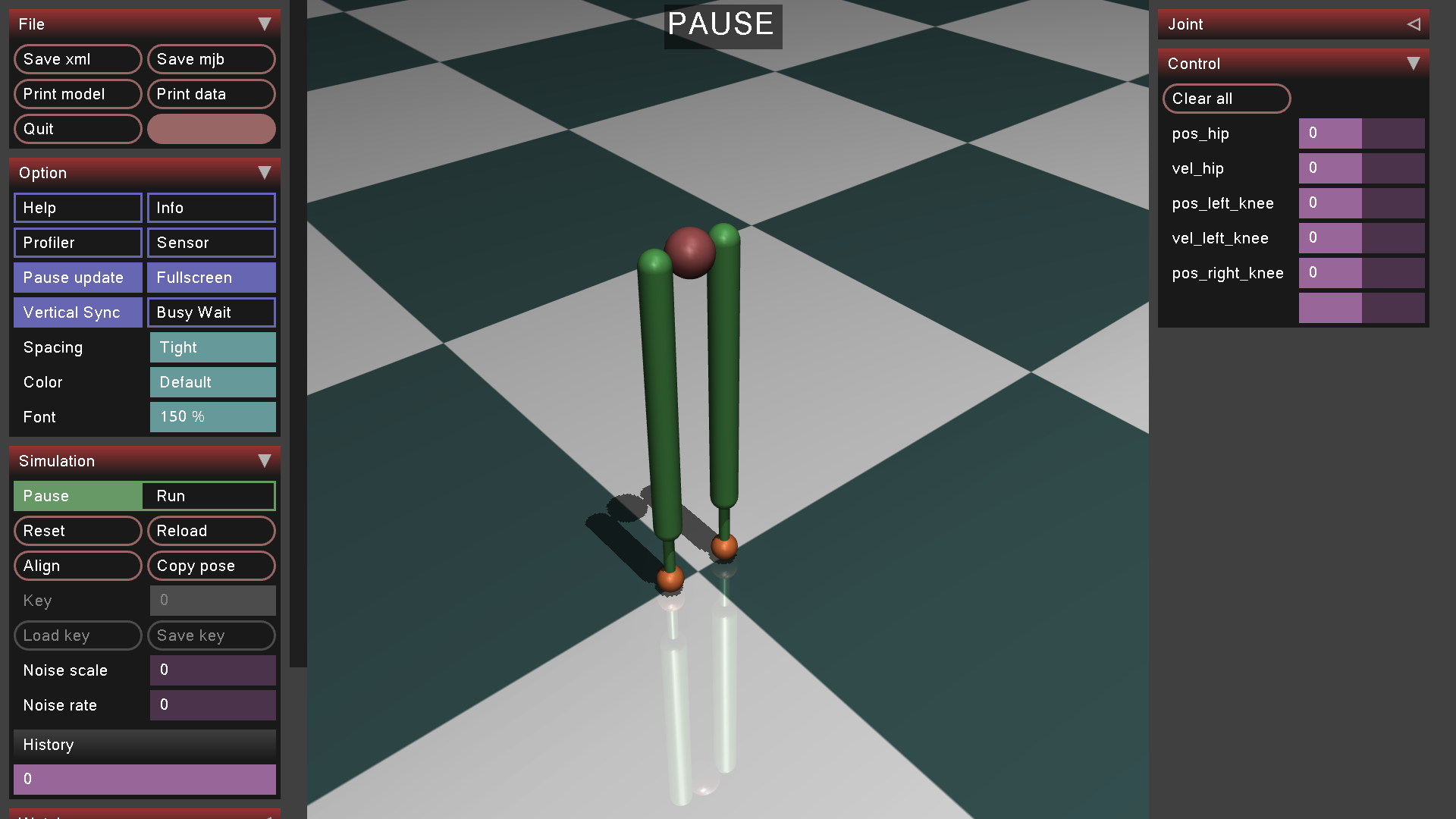
Passive Walker RL — Curriculum-Driven Biped Locomotion in JAX & Brax
A three-stage pipeline (≤ 300 LoC per stage) that bootstraps a passive-dynamic biped from a finite-state expert to a GPU-scale PPO policy in minutes. MuJoCo supplies fidelity; Brax pushes > 1 M env-steps s⁻¹ for massive sweeps, yielding smooth, sample-efficient walking with a single 1 M-param network.
reinforcement-learning robotics jax brax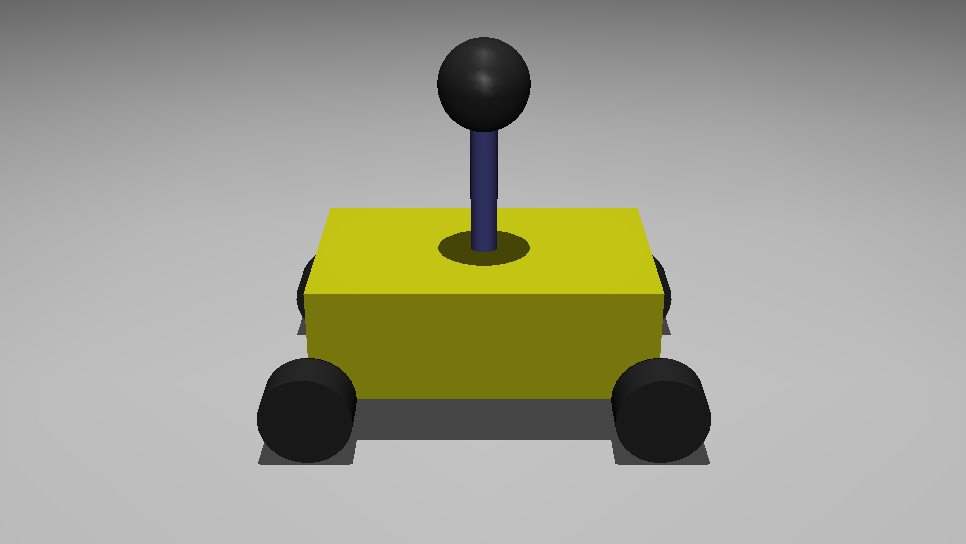
DiffSwing: Neural Cart-Pole Control with JAX & MuJoCo
A hybrid control system that combines neural network energy shaping with classical LQR stabilization for cart-pole swing-up. Trained end-to-end in differentiable JAX simulation with real-time MuJoCo deployment achieving 98% success rate and 1.9s swing-up time.
control reinforcement-learning robotics neural-networks jax
Baxter manipulation with ROS Noetic and object rearrangement
Group project on Bayesian Optimization with transfer learning for sequential object placement and rearrangement on cluttered surfaces. I worked on the physical robot side and ported the Baxter codebase to ROS Noetic.
robotics ROS Baxter manipulation Gazebo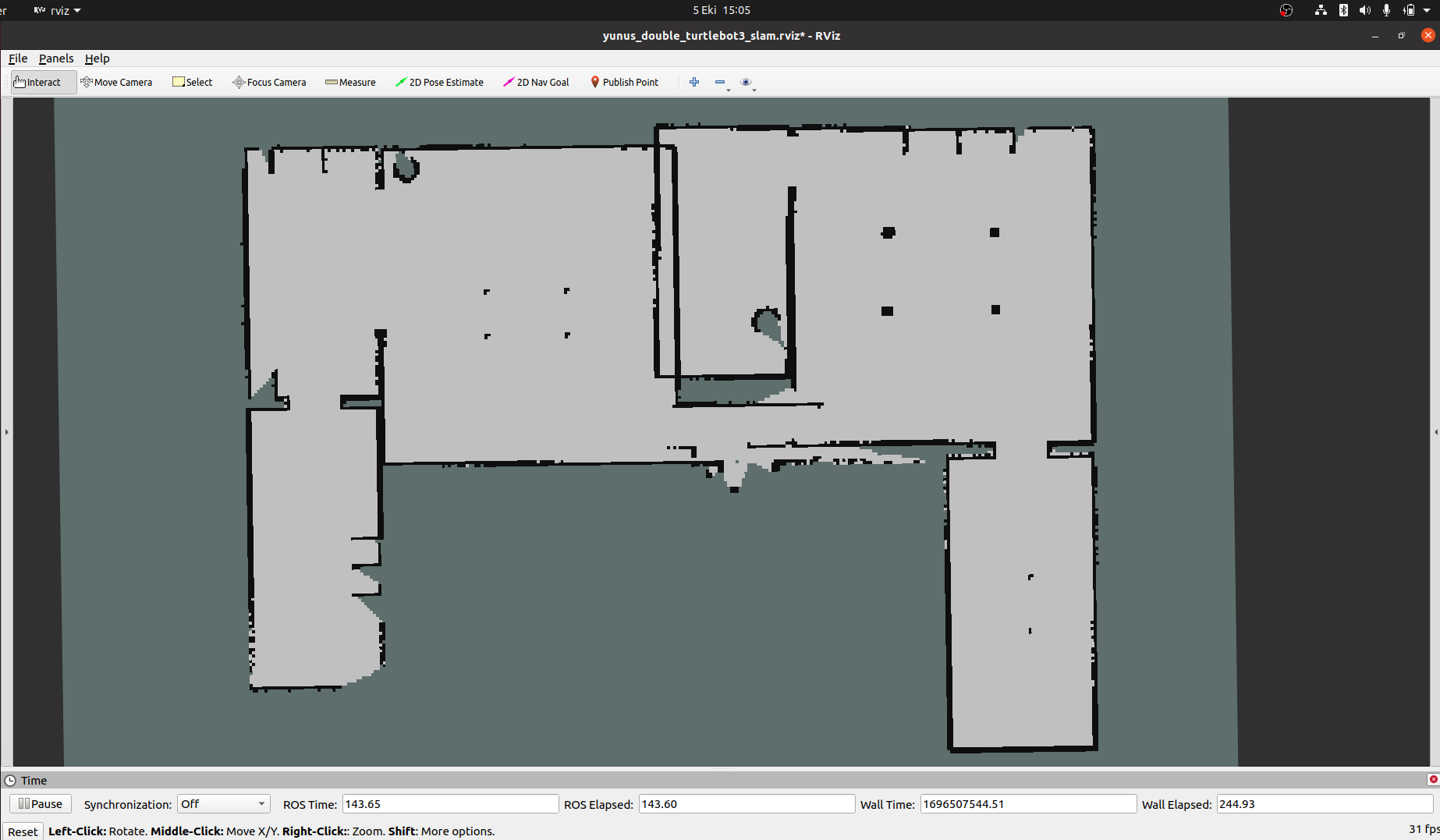
Multiexplorer — Multi-Robot Frontier Exploration with TurtleBot3
My first ROS project: a Gazebo-based study comparing single-, double-, and triple-robot frontier exploration, SLAM, and map-merging with TurtleBot3.
robotics ROS Gazebo SLAM multi-robotCourse Projects
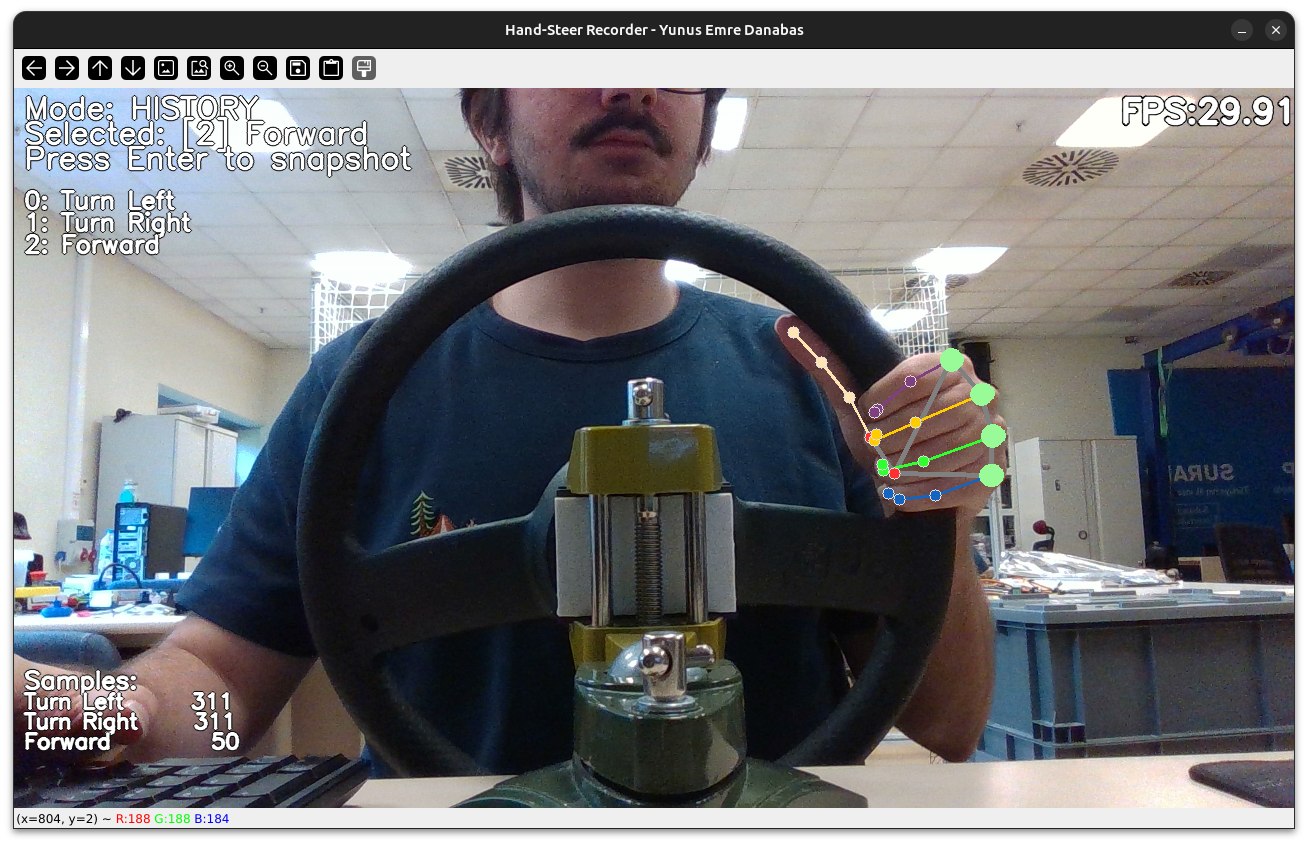
Hand-Steer Sim — Real-Time Gesture Teleoperation for Mobile Robots
Hand-Steer Sim is a vision-only teleoperation stack that converts webcam/RealSense video into ROS geometry_msgs/Twist commands for differential-drive robots. It supports two modes—(1) discrete hand-sign driving and (2) a steering-wheel metaphor that gates turn commands behind a Holding Wheel pose—using MediaPipe landmarks and compact TFLite models. Includes data recording GUI, training notebooks, Docker (CPU/GPU), and Gazebo integration.
robotics computer-vision HRI ROS Gazebo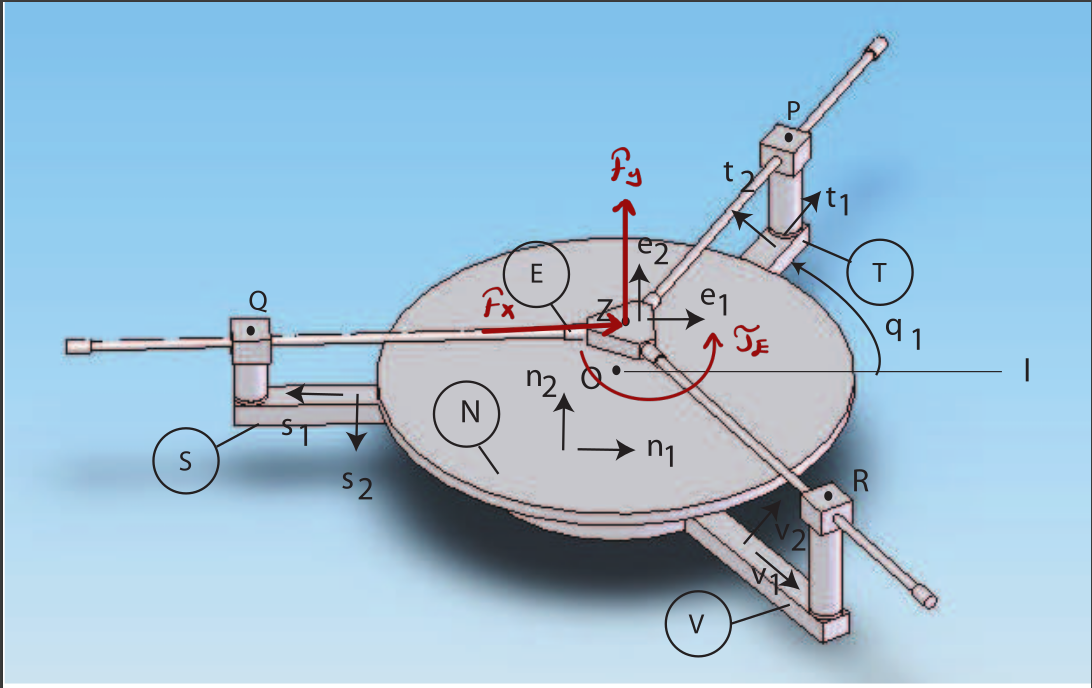
3RRP Mechanism — Kinematic & Dynamic Analysis
A full symbolic and numerical study of a 3-RRP planar parallel manipulator: closed-form kinematics, workspace and isotropy metrics, and Kane vs Lagrange dynamics validated in Simulink.
robotics kinematics dynamics simulation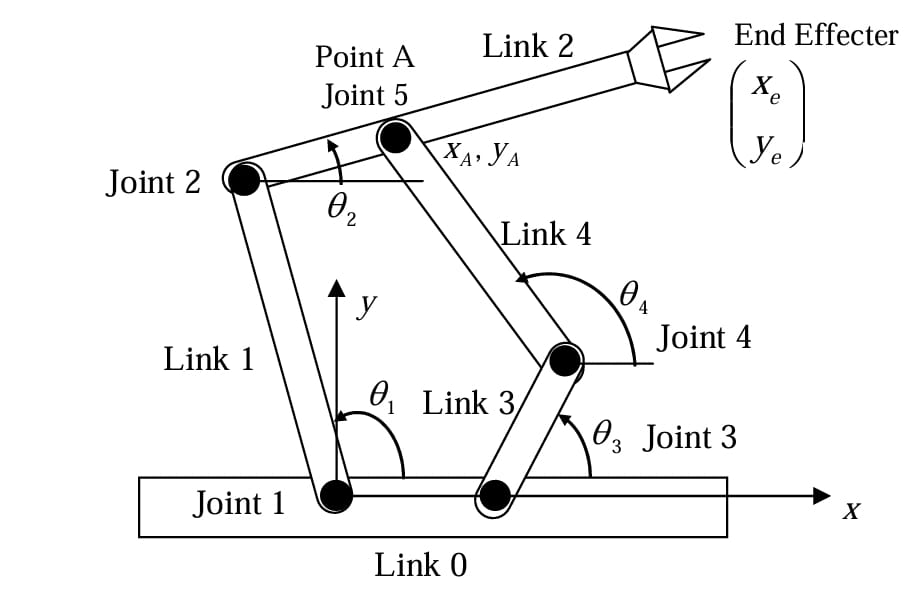
2-DOF Manipulator — Model-Based Real-Time Control
MATLAB/Simulink and TI C2000 control stack: computed-torque, PD with gravity compensation, and joint/task-space transforms for millimetre-level trajectory tracking on a 5-link planar robot in real time.
robotics control real-time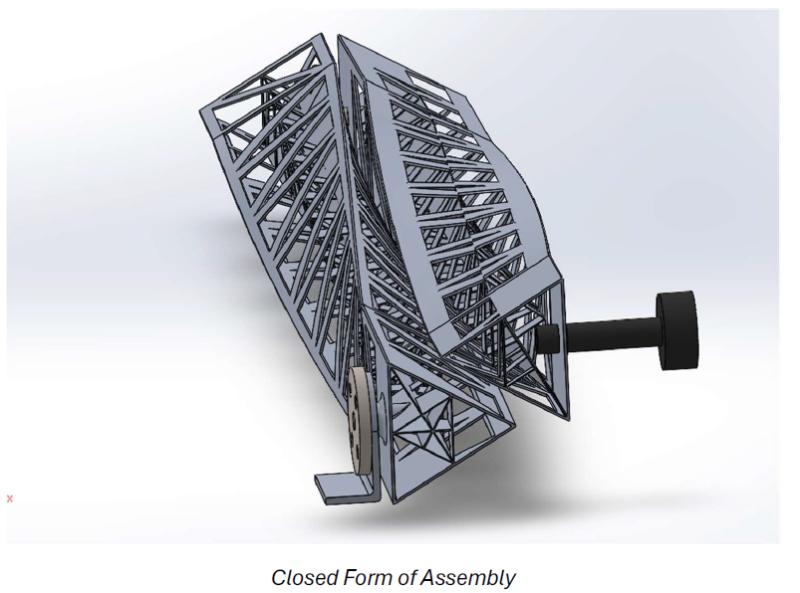
Planar Elbow Manipulator — Design & Control
A 2-DoF planar elbow manipulator that uniquely met every mechanical requirement in ME408, integrating robust CAD, power electronics, and dual-loop control for precise trajectory tracking.
mechanical-design power-electronics control-systems robotics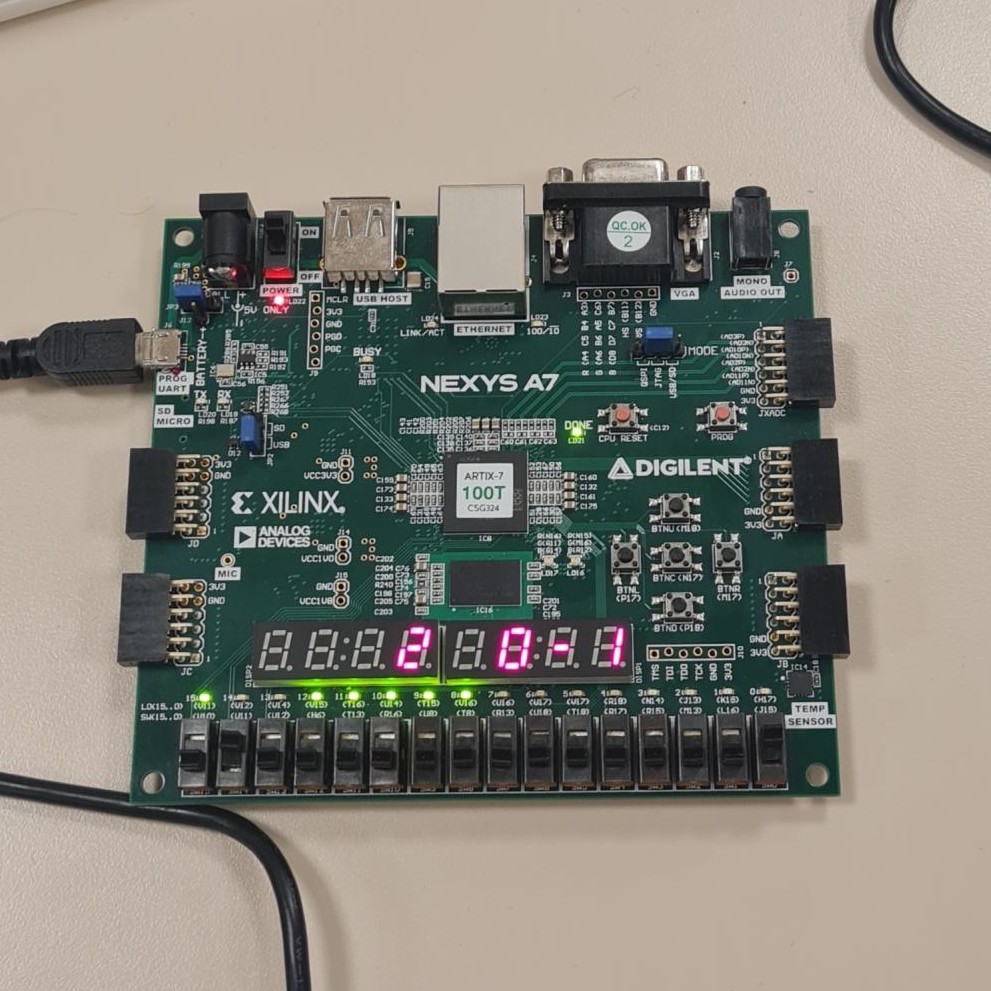
FPGA-AirHockey — Digital Showdown on Nexys A7
Two-player air-hockey game on a Nexys A7 FPGA: Verilog state machine drives a 5×5 LED rink and real-time score displays.
fpga verilog embedded-systems game